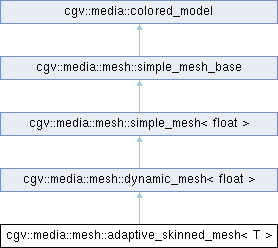
Extension of dynamic_mesh that supports regression of joint locations from shaped mesh as well as pose dependent shape corrections for which the entries of the joint rotation matrices are used. More...
#include <adaptive_skinned_mesh.h>
Public Types | |
| typedef cgv::type::uint32_type | idx_type |
| define index type | |
| typedef cgv::math::fvec< idx_type, 2 > | idx2_type |
| define index pair type | |
| typedef cgv::math::fvec< idx_type, 3 > | idx3_type |
| define index triple type | |
| typedef cgv::math::fvec< idx_type, 4 > | idx4_type |
| define index quadruple type | |
| typedef illum::textured_surface_material | mat_type |
| define material type | |
 Public Types inherited from cgv::media::mesh::dynamic_mesh< T > Public Types inherited from cgv::media::mesh::dynamic_mesh< T > | |
| enum class | blend_shape_mode { direct , indexed , range_indexed } |
| specifies how the blend shapes are stored More... | |
| enum class | vertex_weight_mode { dense , sparse , fixed } |
| specifies how vertex weights are stored More... | |
| typedef cgv::math::fvec< T, 4 > | vec4_type |
| type of 4d vector | |
| typedef cgv::math::fmat< T, 4, 4 > | mat4_type |
| linear transformation | |
| typedef cgv::type::uint32_type | idx_type |
| define index type | |
| typedef cgv::math::fvec< idx_type, 2 > | idx2_type |
| define index pair type | |
| typedef cgv::math::fvec< idx_type, 3 > | idx3_type |
| define index triple type | |
| typedef cgv::math::fvec< idx_type, 4 > | idx4_type |
| define index quadruple type | |
| typedef illum::textured_surface_material | mat_type |
| define material type | |
| enum class | lbs_source_mode { reference , position , intermediate } |
| Which source to use for the Linear Blend Skinning. More... | |
| Public Types inherited from cgv::media::mesh::simple_mesh< T > | |
| using | numeric_type = T |
| typedef simple_mesh< T > | mesh_type |
| type of axis aligned 3d box | |
| typedef cgv::media::axis_aligned_box< T, 3 > | box_type |
| type of axis aligned 3d box | |
| typedef cgv::math::fvec< T, 2 > | vec2_type |
| type of 2d vector | |
| typedef cgv::math::fvec< T, 3 > | vec3_type |
| type of 3d vector | |
| typedef cgv::math::fmat< T, 3, 3 > | mat3_type |
| linear transformation | |
| Public Types inherited from cgv::media::mesh::simple_mesh_base | |
| enum class | attribute_type { begin =0 , position =0 , texcoords =1 , normal =2 , tangent =3 , color =4 , end =5 } |
| different mesh attributes More... | |
| enum | AttributeFlags { AF_position = 1 , AF_texcoords = 2 , AF_normal = 4 , AF_tangent = 8 , AF_color = 16 } |
| typedef cgv::type::uint32_type | idx_type |
| define index type | |
| typedef cgv::math::fvec< idx_type, 2 > | idx2_type |
| define index pair type | |
| typedef cgv::math::fvec< idx_type, 3 > | idx3_type |
| define index triple type | |
| typedef cgv::math::fvec< idx_type, 4 > | idx4_type |
| define index quadruple type | |
| typedef illum::textured_surface_material | mat_type |
| define material type | |
Public Member Functions | |
| size_t | get_nr_shapes () const |
| return the number of blend shapes used to for shape adaptation | |
| size_t | get_nr_pose_corrections () const |
| return number of pose correction blend shapes | |
| void | shape_mesh (const std::vector< T > &shape, bool use_parallel_implementation=false) |
given shape weights, compute the rest pose shaped mesh vertex locations into the dynamic_mesh<T> member shaped_positions | |
| void | pose_mesh (const vec3_type &translation, const std::vector< vec3_type > &pose, bool apply_pose_correction=true, bool apply_lbs=true, bool use_parallel_implementation=false) |
starting with vertex position in member shaped_positions, optionally apply pose correction, perform linear blend skinning and finally recompute surface normals | |
| Public Member Functions inherited from cgv::media::mesh::dynamic_mesh< T > | |
| void | store_in_reference_positions () |
| store current positions in reference positions | |
| void | store_in_intermediate_positions () |
| store current positions in intermediate positions | |
| const std::vector< vec3_type > & | get_intermediate_positions () const |
| return const reference to intermediate position vector | |
| void | recover_intermediate_positions () |
| copy intermediate positions to positions | |
| uint32_t | add_blend_shape (blend_shape_mode mode, idx_type nr_data, idx_type nr_indices=0) |
| Add a new blend shape. | |
| void | add_blend_shape_data (const vec3_type &d) |
| Add another data point to the data buffer. | |
| void | add_blend_shape_index (idx_type i) |
| Add another index to the index buffer. | |
| bool | has_blend_shape_vector (idx_type bi, idx_type vi) const |
| Query if a blend shape has a vertex with a given ID. | |
| vec3_type | get_blend_shape_vector (idx_type bi, idx_type vi) const |
| Returns one vertex of one blend shape. | |
| size_t | get_nr_blend_shapes () const |
| Return how many blend shapes this mesh has. | |
| void | apply_blend_shapes (const std::vector< T > &weights, idx_type blend_shape_offset=0, bool only_add=false, bool use_parallel_implementation=false) |
| this function applies weights.size() number of blend shapes starting at offset blend_shape_offset and stores result in mesh position attribute | |
| void | set_vertex_weight_mode (vertex_weight_mode mode) |
| void | begin_vertex_weight_vertex () |
| idx_type | vertex_weight_begin (idx_type vi) const |
| return the begin index for vertex weights of given vertex | |
| idx_type | vertex_weight_end (idx_type vi) const |
| return the end index for vertex weights of given vertex | |
| T | get_vertex_weight (idx_type vi, idx_type ji) const |
| return the vertex weight of vertex vi and joint ji | |
| void | add_vertex_weight_data (T w) |
| void | add_vertex_weight_index (idx_type i) |
| size_t | get_nr_vertex_weights () const |
| size_t | get_nr_vertex_weight_indices () const |
| idx_type | get_nr_joints () const |
| std::vector< mat4_type > | compute_joint_transformations (const std::vector< vec3_type > &reference_joint_locations, const vec3_type &translation, const std::vector< vec3_type > &target_spin_vectors) const |
| compute joint transformations from reference joint locations, target translation and target spin vectors | |
| std::vector< mat4_type > | compute_joint_transformations (const std::vector< vec3_type > &reference_joint_locations, const vec3_type &translation, const std::vector< mat3_type > &target_rotations) const |
| compute joint transformations from reference joint locations, target translation and target rotation matrices | |
| const std::vector< int32_t > & | get_joint_parents () const |
| return const reference to joint parent vector | |
| std::vector< int32_t > & | ref_joint_parents () |
| return mutable reference to joint parent vector | |
| void | lbs (const std::vector< mat4_type > &joint_matrices, lbs_source_mode mode) |
| perform linear blend skinning on reference positions or the current mesh position attribute | |
| Public Member Functions inherited from cgv::media::mesh::simple_mesh< T > | |
| simple_mesh (const simple_mesh< T > &sm) | |
| copy constructor | |
| simple_mesh (simple_mesh< T > &&sm) | |
| move constructor | |
| simple_mesh (const std::string &conway_notation="") | |
| assignment operator | |
| simple_mesh< T > & | operator= (const simple_mesh< T > &sm) |
| assignment operator | |
| simple_mesh< T > & | operator= (simple_mesh< T > &&sm) |
| move assignment operator | |
| uint32_t | get_coord_size () const |
| return the size of one coordinate in bytes | |
| void | clear () |
| clear simple mesh | |
| idx_type | new_position (const vec3_type &p) |
| add a new position and return position index | |
| idx_type | get_nr_positions () const |
| access to positions | |
| vec3_type & | position (idx_type pi) |
| const vec3_type & | position (idx_type pi) const |
| const std::vector< vec3_type > & | get_positions () const |
| std::vector< vec3_type > & | ref_positions () |
| idx_type | new_normal (const vec3_type &n) |
| add a new normal and return normal index | |
| bool | has_normals () const |
| access to normals | |
| idx_type | get_nr_normals () const |
| vec3_type & | normal (idx_type ni) |
| const vec3_type & | normal (idx_type ni) const |
| const std::vector< vec3_type > & | get_normals () const |
| idx_type | new_tangent (const vec3_type &tc) |
| add a new tangent and return tangent index | |
| bool | has_tangents () const |
| access to tangents | |
| idx_type | get_nr_tangents () const |
| vec3_type & | tangent (idx_type ti) |
| const vec3_type & | tangent (idx_type ti) const |
| idx_type | new_tex_coord (const vec2_type &tc) |
| add a new texture coordinate and return texture coordinate index | |
| bool | has_tex_coords () const |
| access to texture coordinates | |
| idx_type | get_nr_tex_coords () const |
| vec2_type & | tex_coord (idx_type ti) |
| const vec2_type & | tex_coord (idx_type ti) const |
| bool | compute_face_normal (idx_type fi, vec3_type &nml, bool normalize=true) const |
| compute the normal nml of a face and return whether this was possible | |
| vec3_type | compute_face_center (idx_type fi) const |
| compute face center | |
| void | compute_face_normals (bool construct_normal_indices=true) |
| compute per face normals (ensure that per corner normal indices are set correspondingly) | |
| void | compute_face_tangents (bool construct_tangent_indices=true) |
| compute per face tangents (ensure that per corner tangent indices are set correspondingly) | |
| void | ambo () |
| Conway ambo operator. | |
| void | truncate (T lambda=0.33333f) |
| Conway truncate operator. | |
| void | snub (T lambda=0.33333f) |
| Conway snub operator. | |
| void | dual () |
| Conway dual operator. | |
| void | gyro (T lambda=0.3333f) |
| Conway gyro operator. | |
| void | join () |
| Conway join operator. | |
| void | ortho () |
| Conway ortho operator. | |
| void | construct_conway_polyhedron (const std::string &conway_notation) |
| construct new mesh according to Conway polyhedron notation: [a|t|s|d|g|j|o]*[T|C|O|D|I] which is evaluated from right to left and last capital letter is Platonic solid and lowercase letters are Conway operations | |
| box_type | compute_box () const |
| compute the axis aligned bounding box | |
| void | compute_vertex_normals (bool use_parallel_implementation=true) |
| compute vertex normals by averaging triangle normals | |
| void | construct (const obj_loader_generic< T > &loader, bool copy_grp_info, bool copy_material_info) |
| construct from obj loader | |
| bool | read (const std::string &file_name) |
| read simple mesh from file (currently only obj and stl are supported) | |
| bool | write (const std::string &file_name) const |
| write simple mesh to file (currently only obj is supported) | |
| unsigned | extract_vertex_attribute_buffer (const std::vector< idx4_type > &unique_quadruples, bool include_tex_coords, bool include_normals, bool include_tangents, std::vector< T > &attrib_buffer, bool *include_colors_ptr=0, int *num_floats_in_vertex=nullptr) const |
| Extract vertex attribute array and element array buffers for triangulation and edges in wireframe. | |
| void | transform (const mat3_type &linear_transformation, const vec3_type &translation) |
| apply transformation to mesh | |
| void | transform (const mat3_type &linear_transform, const vec3_type &translation, const mat3_type &inverse_linear_transform) |
| apply transformation to mesh with given inverse linear transformation | |
| Public Member Functions inherited from cgv::media::mesh::simple_mesh_base | |
| simple_mesh_base () | |
| default constructor | |
| simple_mesh_base (const simple_mesh_base &smb) | |
| copy constructor | |
| simple_mesh_base (simple_mesh_base &&smb) | |
| move constructor | |
| simple_mesh_base & | operator= (const simple_mesh_base &smb) |
| assignment operator | |
| simple_mesh_base & | operator= (simple_mesh_base &&smb) |
| move assignment operator | |
| idx_type | start_face () |
| Create a new empty face to which new corners are added. | |
| idx_type | new_corner (idx_type position_index, idx_type normal_index=-1, idx_type tex_coord_index=-1) |
| Create a new corner with the given attributes. | |
| idx_type | c2p (idx_type ci) const |
| return position index of corner | |
| idx_type | c2n (idx_type ci) const |
| return normal index of corner | |
| bool | has_normal_indices () const |
| return whether normal indices are stored | |
| idx_type | c2t (idx_type ci) const |
| return texture index of corner | |
| bool | has_tex_coord_indices () const |
| return whether texture coordinate indices are stored | |
| idx_type | get_nr_faces () const |
| return the number of faces | |
| idx_type | get_nr_corners () const |
| return the number of corners | |
| idx_type | begin_corner (idx_type fi) const |
| Retrieve the vertex index of the first corner of a face. | |
| idx_type | end_corner (idx_type fi) const |
| Retrieve index of the vertex which follows the end corner of a face. | |
| idx_type | face_degree (idx_type fi) const |
| return number of edges/corners of face with index fi | |
| size_t | get_nr_materials () const |
| return number of materials in mesh | |
| idx_type | new_material () |
| add a new material and return its index | |
| const mat_type & | get_material (size_t i) const |
| return const reference to i-th material | |
| mat_type & | ref_material (size_t i) |
| return reference to i-th material | |
| const idx_type & | material_index (idx_type fi) const |
| return material index of given face | |
| idx_type & | material_index (idx_type fi) |
| return reference to material index of given face | |
| size_t | get_nr_groups () const |
| return number of face groups | |
| const std::string & | group_name (size_t i) const |
| return the name of the i-th face group | |
| std::string & | group_name (size_t i) |
| set a new group name | |
| idx_type | new_group (const std::string &name) |
| add a new group and return its index | |
| const idx_type & | group_index (idx_type fi) const |
| return group index of given face | |
| idx_type & | group_index (idx_type fi) |
| return reference to group index of given face | |
| void | revert_face_orientation () |
| revert face orientation | |
| void | sort_faces (std::vector< idx_type > &perm, bool by_group=true, bool by_material=true) const |
| Calculate a permutation of face indices which sorts them by group and/or material. | |
| void | merge_indices (std::vector< idx_type > &vertex_indices, std::vector< idx4_type > &unique_tuples, bool *include_tex_coords_ptr=0, bool *include_normals_ptr=0, bool *include_tangents_ptr=0) const |
| Transforms n individual vertex attribute indices into one list of unique index n-tuples. | |
| void | extract_triangle_element_buffer (const std::vector< idx_type > &vertex_indices, std::vector< idx_type > &triangle_element_buffer, const std::vector< idx_type > *face_permutation_ptr=0, std::vector< idx3_type > *material_group_start_ptr=0) const |
| Extract element array buffers for triangulation. | |
| void | extract_wireframe_element_buffer (const std::vector< idx_type > &vertex_indices, std::vector< idx_type > &edge_element_buffer) const |
| Extract element array buffers for edges in wireframe. | |
| idx_type | extract_vertex_attribute_buffer_base (const std::vector< idx4_type > &unique_quadruples, AttributeFlags &flags, std::vector< uint8_t > &attrib_buffer) const |
| extract vertex attribute buffer for the given flags and return size of vertex in bytes | |
| void | extract_triangle_indices (std::vector< idx3_type > &position_indices, std::vector< idx3_type > *tex_coord_indices=nullptr, std::vector< idx3_type > *normal_indices=nullptr, std::vector< idx3_type > *tangent_indices=nullptr) const |
| Extract index lists of triangle positions and optional attributes. | |
| idx_type | compute_inv (std::vector< idx_type > &inv, bool link_non_manifold_edges=false, std::vector< idx_type > *p2c_ptr=0, std::vector< idx_type > *next_ptr=0, std::vector< idx_type > *prev_ptr=0, std::vector< idx_type > *unmatched=0, std::vector< idx_type > *non_manifold=0, std::vector< idx_type > *unmatched_elements=0, std::vector< idx_type > *non_manifold_elements=0) const |
| Do inverse matching of half-edges. | |
| idx_type | compute_c2e (const std::vector< idx_type > &inv, std::vector< idx_type > &c2e, std::vector< idx_type > *e2c_ptr=0) const |
| given the inv corners compute vector storing per corner the edge index and optionally per edge one corner index and return edge count (implementation assumes closed manifold connectivity) | |
| void | compute_c2f (std::vector< idx_type > &c2f) const |
| compute index vector with per corner its face index | |
| Public Member Functions inherited from cgv::media::colored_model | |
| colored_model () | |
| construct colored model | |
| colored_model (const colored_model &cm) | |
| copy constructur | |
| colored_model (colored_model &&cm) | |
| move constructur | |
| colored_model & | operator= (const colored_model &cm) |
| assignment operator | |
| colored_model & | operator= (colored_model &&cm) |
| move assignment operator | |
| virtual | ~colored_model () |
| destruct colored model | |
| bool | has_colors () const |
| check whether colors have been allocated | |
| void | set_color (size_t i, const void *col_ptr) |
| set i-th color to color of type stored in storage | |
| void | set_color (size_t i, const rgb &col) |
| set i-th color from color of type rgb | |
| void | set_color (size_t i, const rgb8 &col) |
| set i-th color from color of type rgba | |
| void | set_color (size_t i, const rgba &col) |
| set i-th color from color of type rgb8 | |
| void | set_color (size_t i, const rgba8 &col) |
| set i-th color from color of type rgba8 | |
| void | put_color (size_t i, void *col_ptr) const |
| set color of type stored in storage to i-th color | |
| void | put_color (size_t i, rgb &col) const |
| set color of type rgb to i-th color | |
| void | put_color (size_t i, rgba &col) const |
| set color of type rgba to i-th color | |
| void | put_color (size_t i, rgb8 &col) const |
| set color of type rgb8 to i-th color | |
| void | put_color (size_t i, rgba8 &col) const |
| set color of type rgba8 to i-th color | |
| size_t | get_nr_colors () const |
| return number of allocated colors | |
| void | resize_colors (size_t nr_colors) |
| resize the color storage to given number of colors | |
| size_t | get_color_size () const |
| return the size of one allocated color in byte | |
| ColorType | get_color_storage_type () const |
| return storage type of colors, if no colors are allocated CT_RGBA8 is returned | |
| const void * | get_color_data_ptr () const |
| const void * | get_color_data_vector_ptr () const |
| void * | ref_color_data_ptr () |
| void * | ref_color_data_vector_ptr () |
| void | ensure_colors (ColorType _color_type, size_t nr_colors=-1) |
| ensure that colors are allocated and of given storage type | |
| void | destruct_colors () |
| destruct color storage | |
Public Attributes | |
| unsigned | nr_shapes = 0 |
| number of blend shapes that define mesh shape | |
| std::vector< std::vector< T > > | joint_regressors |
| per joint for each mesh position a weight used to regress the joint locations | |
| std::vector< std::vector< vec3_type > > | alternative_joint_regressors |
| alternative representation of joint regressors with one vector per joint and base mesh/shape | |
| std::vector< vec3_type > | joint_locations |
| regressed joint locations | |
Protected Member Functions | |
| void | compute_rotation_matrices (const std::vector< vec3_type > &pose, std::vector< mat3_type > &rotation_matrices) |
| convertex vector of spin vectors resembling the pose into a vector of rotation matrices | |
| std::vector< T > | compute_pose_correction_vector (const std::vector< mat3_type > &rotation_matrices) const |
| given vector of rotation matrices, compute vector of pose correction weights by skipping matrix of base joint, subtracting identity matrix and flatten transpose of resulting 3x3 matrices | |
| void | compute_alternative_joint_regressors () |
| compute the alternative joint regressors after shape blend shapes have been defined | |
| void | compute_joint_locations (const std::vector< vec3_type > &P) |
given the vertex locations after applying the shape blend shapes, compute the member variable joint_locations | |
| Protected Member Functions inherited from cgv::media::mesh::simple_mesh< T > | |
| bool | has_attribute (attribute_type attr) const |
| const uint8_t * | get_attribute_ptr (attribute_type attr, idx_type ai=0) const |
| size_t | get_attribute_size (attribute_type attr) const |
| size_t | get_attribute_offset (attribute_type attr) const |
| vec3_type | compute_normal (const vec3_type &p0, const vec3_type &p1, const vec3_type &p2) |
Protected Attributes | |
| std::vector< vec3_type > | shaped_positions |
| storage for positions after applying the shape blend shapes | |
| Protected Attributes inherited from cgv::media::mesh::dynamic_mesh< T > | |
| std::vector< vec3_type > | reference_positions |
| Storage for vertex positions in the bind-pose. | |
| std::vector< vec3_type > | intermediate_positions |
| Storage for vertex positions after Linear Blend Skinning. | |
| std::vector< vec3_type > | blend_shape_data |
| Storage for the blend shape vertices. | |
| std::vector< uint32_t > | blend_shape_indices |
| Storage for the indices (if the blend shapes are defined by indices) | |
| std::vector< blend_shape > | blend_shapes |
| Storage for all the blendshape definitions. | |
| vertex_weight_mode | weight_mode |
| How the vertex weights are stored for this instance. | |
| int32_t | max_nr_weights_per_vertex = -1 |
| in case of fixed vertex_weight_mode the number of weights per vertex | |
| std::vector< int32_t > | joint_parents |
| for each joint the index of the parent joint or -1 for root joints | |
| std::vector< T > | vertex_weight_data |
| continuous storage of all vertex weights | |
| std::vector< uint32_t > | vertex_weight_indices |
| continuous storage of vertex indices | |
| std::vector< uint32_t > | vertex_weight_index_begins |
| for each vertex the first index in vertex_weight_data and vertex_weight_indices | |
| Protected Attributes inherited from cgv::media::mesh::simple_mesh< T > | |
| std::vector< vec3_type > | positions |
| std::vector< vec3_type > | normals |
| std::vector< vec3_type > | tangents |
| std::vector< vec2_type > | tex_coords |
| Protected Attributes inherited from cgv::media::mesh::simple_mesh_base | |
| std::vector< idx_type > | position_indices |
| std::vector< idx_type > | tex_coord_indices |
| std::vector< idx_type > | normal_indices |
| std::vector< idx_type > | tangent_indices |
| std::vector< idx_type > | faces |
| std::vector< idx_type > | group_indices |
| std::vector< std::string > | group_names |
| std::vector< idx_type > | material_indices |
| std::vector< mat_type > | materials |
| Protected Attributes inherited from cgv::media::colored_model | |
| abst_color_storage * | color_storage_ptr |
| pointer to color storage | |
Additional Inherited Members | |
| Static Public Member Functions inherited from cgv::media::mesh::simple_mesh_base | |
| static std::string | get_attribute_name (attribute_type attr) |
| static AttributeFlags | get_attribute_flag (attribute_type attr) |
Detailed Description
class cgv::media::mesh::adaptive_skinned_mesh< T >
Extension of dynamic_mesh that supports regression of joint locations from shaped mesh as well as pose dependent shape corrections for which the entries of the joint rotation matrices are used.
- Template Parameters
-
T The coordinate base-type
Definition at line 16 of file adaptive_skinned_mesh.h.
Member Typedef Documentation
◆ idx2_type
| typedef cgv::math::fvec<idx_type,2> cgv::media::mesh::simple_mesh_base::idx2_type |
define index pair type
Definition at line 32 of file simple_mesh.h.
◆ idx3_type
| typedef cgv::math::fvec<idx_type,3> cgv::media::mesh::simple_mesh_base::idx3_type |
define index triple type
Definition at line 34 of file simple_mesh.h.
◆ idx4_type
| typedef cgv::math::fvec<idx_type,4> cgv::media::mesh::simple_mesh_base::idx4_type |
define index quadruple type
Definition at line 36 of file simple_mesh.h.
◆ idx_type
| typedef cgv::type::uint32_type cgv::media::mesh::simple_mesh_base::idx_type |
define index type
Definition at line 30 of file simple_mesh.h.
◆ mat_type
| typedef illum::textured_surface_material cgv::media::mesh::simple_mesh_base::mat_type |
define material type
Definition at line 38 of file simple_mesh.h.
Member Function Documentation
◆ compute_alternative_joint_regressors()
|
protected |
compute the alternative joint regressors after shape blend shapes have been defined
Definition at line 30 of file adaptive_skinned_mesh.cxx.
◆ compute_joint_locations()
|
protected |
given the vertex locations after applying the shape blend shapes, compute the member variable joint_locations
Definition at line 19 of file adaptive_skinned_mesh.cxx.
◆ compute_pose_correction_vector()
|
protected |
given vector of rotation matrices, compute vector of pose correction weights by skipping matrix of base joint, subtracting identity matrix and flatten transpose of resulting 3x3 matrices
Definition at line 42 of file adaptive_skinned_mesh.cxx.
◆ compute_rotation_matrices()
|
protected |
convertex vector of spin vectors resembling the pose into a vector of rotation matrices
Definition at line 9 of file adaptive_skinned_mesh.cxx.
◆ get_nr_pose_corrections()
|
inline |
return number of pose correction blend shapes
Definition at line 52 of file adaptive_skinned_mesh.h.
◆ get_nr_shapes()
|
inline |
return the number of blend shapes used to for shape adaptation
Definition at line 50 of file adaptive_skinned_mesh.h.
◆ pose_mesh()
| void cgv::media::mesh::adaptive_skinned_mesh< T >::pose_mesh | ( | const vec3_type & | translation, |
| const std::vector< vec3_type > & | pose, | ||
| bool | apply_pose_correction = true, |
||
| bool | apply_lbs = true, |
||
| bool | use_parallel_implementation = false |
||
| ) |
starting with vertex position in member shaped_positions, optionally apply pose correction, perform linear blend skinning and finally recompute surface normals
Definition at line 63 of file adaptive_skinned_mesh.cxx.
◆ shape_mesh()
| void cgv::media::mesh::adaptive_skinned_mesh< T >::shape_mesh | ( | const std::vector< T > & | shape, |
| bool | use_parallel_implementation = false |
||
| ) |
given shape weights, compute the rest pose shaped mesh vertex locations into the dynamic_mesh<T> member shaped_positions
Definition at line 55 of file adaptive_skinned_mesh.cxx.
Member Data Documentation
◆ alternative_joint_regressors
| std::vector<std::vector<vec3_type> > cgv::media::mesh::adaptive_skinned_mesh< T >::alternative_joint_regressors |
alternative representation of joint regressors with one vector per joint and base mesh/shape
Definition at line 34 of file adaptive_skinned_mesh.h.
◆ joint_locations
| std::vector<vec3_type> cgv::media::mesh::adaptive_skinned_mesh< T >::joint_locations |
regressed joint locations
Definition at line 36 of file adaptive_skinned_mesh.h.
◆ joint_regressors
| std::vector<std::vector<T> > cgv::media::mesh::adaptive_skinned_mesh< T >::joint_regressors |
per joint for each mesh position a weight used to regress the joint locations
Definition at line 32 of file adaptive_skinned_mesh.h.
◆ nr_shapes
| unsigned cgv::media::mesh::adaptive_skinned_mesh< T >::nr_shapes = 0 |
number of blend shapes that define mesh shape
Definition at line 30 of file adaptive_skinned_mesh.h.
◆ shaped_positions
|
protected |
storage for positions after applying the shape blend shapes
Definition at line 39 of file adaptive_skinned_mesh.h.
The documentation for this class was generated from the following files:
- cgv/media/mesh/adaptive_skinned_mesh.h
- cgv/media/mesh/adaptive_skinned_mesh.cxx